Image Size
X-Large
Alignment
Center
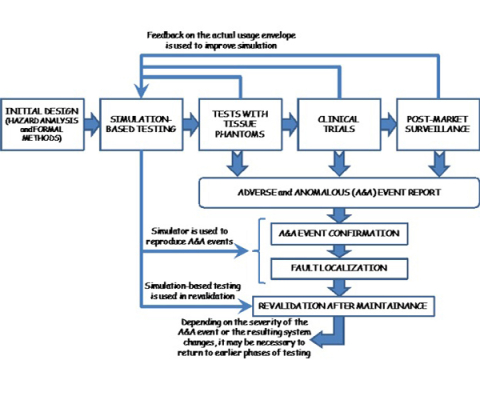
This research seeks to create a framework for assessing the reliability and safety of robotic surgery systems, including its hardware and software, during development, field testing, and general deployment. The framework will use simulations to assess pre-clinical reliability before deployment, and after deployment the framework will use data collection through online system monitoring as it is used in the field, followed by analysis to assess operational reliability and safety. The framework also aims to support post-market surveillance of these systems for to continually monitor reliability and safety following system maintenance.
This is a MeRCIS project under the guidance of Dr. M. Cenk Cavusoglu.