Image Size
X-Large
Alignment
Center
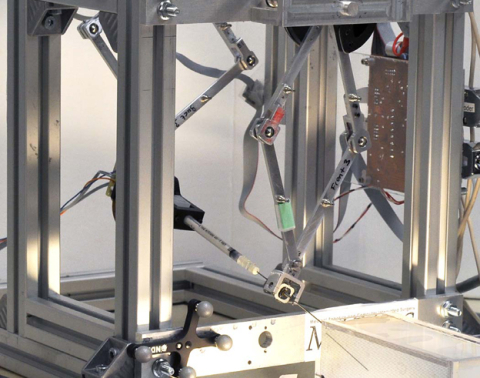
Needle-based percutaneous interventions are widely performed for diagnostic and therapeutic purposes. In such interventions, the accuracy of needle placement is frequently cited as one of the most important factor in the outcome the procedure. However, consistently accurate manual needle placement for deep-tissue targets is a significant challenge, even under intra-operative image guidance. The robotic tools developed for this project will overcome these obstacles, improving precision and consistency of percutaneous interventions, to reliably perform diagnostic interventions on smaller lesions and effectively target them for therapy.
This is a MeRCIS project under the guidance of Dr. M. Cenk Cavusoglu.