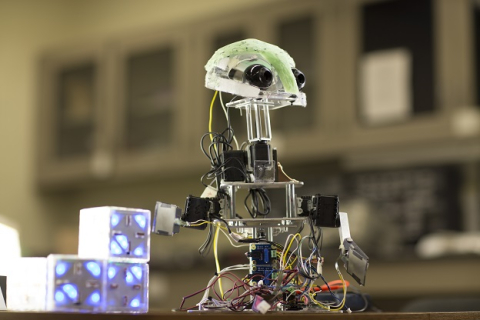
Philos, the sociable robot, could help give thousands of people portable, low cost medical care as well as companionship. When finished, Philos will be a customizable, reprogrammable robot that can interact socially with humans and monitor real-time health data by wirelessly communicating through wearable sensors with people who require continuous monitoring, such as the elderly or disabled. Philos will be suitable for both single user and multiple users. This project is one of the undertakings of the Distributed Intelligence and Robotics Lab, led by Dr. Kiju Lee.
The current model of Philos has a total of seven degrees of freedom in its motion. Each arm has two degrees of rotational freedom and the head also has two degrees of freedom (pan and tilt). These structures are actuated by servo motors, which are controlled by half-duplex serial communication with the microcontroller. In addition, Philos’s upper body is given one degree of translational freedom generated by two electric linear actuators controlled using an H-bridge integrated circuit (IC). Philos also has a wide range of expression, from friendly to unfriendly, and tracks and responds to human faces in order to indicate its interest in its companion. In addition, Philos can also recognize and distinguish each individual it has interacted with previously. Creations like Philos push beyond the typical conceptions of what robots can do, with the understanding that robotic systems can positively affect every aspect of wellbeing.