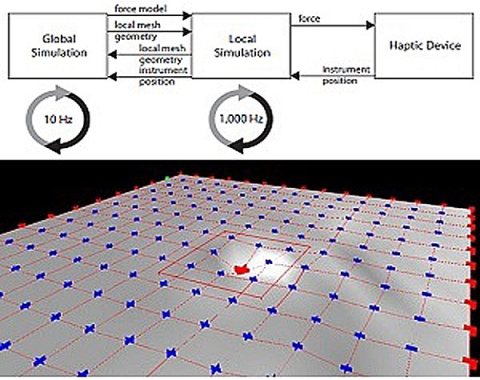
Haptic interaction is an increasingly common form of interface with virtual environment simulations. We have developed algorithms for high fidelity haptic rendering of sliding frictional contact during the manipulation of deformable objects in virtual environments. In order to model intermittent and sliding contact, we have developed a multi-rate simulation approach which uses a local geometric model and a local dynamic model that are operated at haptic update rates. The local geometric and dynamic models are used to perform collision detection and response as part of the high-update-rate haptic loop, with sub-sample collision detection and a novel constraint-based hybrid collision response method.
This is a MeRCIS project under the guidance of Dr. M. Cenk Cavusoglu.