Image Size
X-Large
Alignment
Center
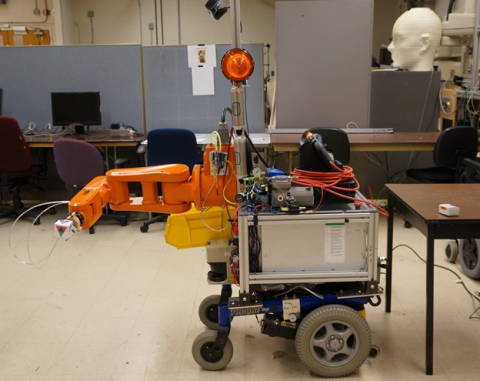
The ABBY mobile manipulator platform automates “kitting” operations where the components of a kit are retrieved from inventory by ABBY and taken to workstations where skilled workers assemble those components into a complex part for use in the manufacturing process. This type of robot automates the mundane task of retrieving parts to reduce cost and improve efficiency. ABBY was created under the supervision of Dr. Greg Lee with the help of two CWRU students, Ed Venator (MS) and Luc Bettaieb (UG) and the support of ABB Ltd. You can see ABBY in action for yourself: