Image Size
X-Large
Alignment
Center
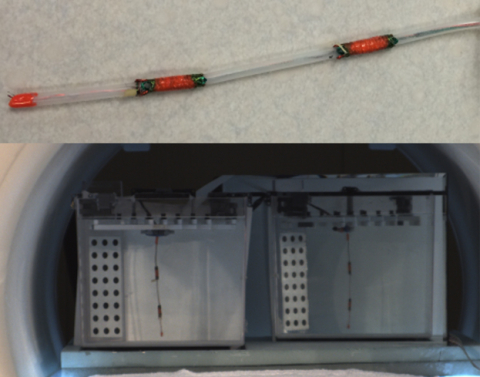
The MeRCIS Lab is working to develop a robotic active catheter system that can perform atrial fibrillation ablation under real-time inter-operative magnetic resonance imaging (MRI) guidance. The project integrates high-speed MRI technologies with robotic motion planning and control techniques to develop a novel co-robotic system. The research focuses on the development of new models and algorithms for robotic motion planning and for the control of active catheter systems and algorithms to achieve real-time intra-operative MRI acquisition and image reconstruction, as well as hardware realization and experimental validation of the pioneered technologies.
This project is being led Dr. M. Cenk Cavusoglu.