In addition to the development of a tele-surgical robot for beating heart surgery our research also focuses on the development of miniaturized actuation and sensor systems that can be used as enabling technologies for minimally invasive robotic surgical systems. Minimally invasive surgery can drastically reduce surgical and post-surgical complications, and greatly increase positive outcomes of even the most complex surgeries.
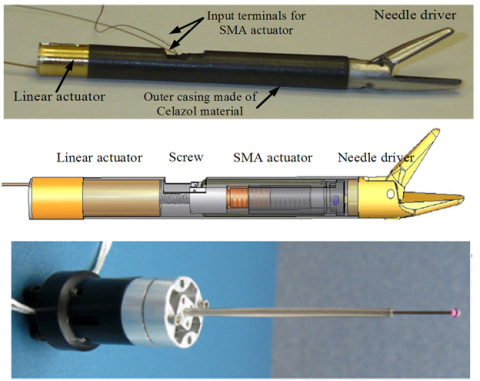
Examples of some of the systems developed at the IRI include an integrated hybrid actuator system that combines shape memory alloy and DC motor actuators, and a whisker sensor to detect the relative motion between the surgical instrument and the heart. We are also developing a millirobotic gripper with integrated actuation. The diameter and length of the tool is restricted in order to give maneuverability to the millirobot and to create less damage to the tissue during the incision. This design gives the robot a high gripping force in a relatively small machine. You can see the millirobotic gripper in action:
This is a MeRCIS project under the guidance of Dr. M. Cenk Cavusoglu.