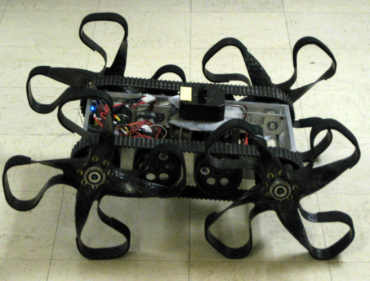
USAR Whegs™ is a robot being developed for Urban Search and Rescue missions that implements several new features into Whegs™ robot design. It is the first quadruped Whegs™ robot of this scale (Mini-Whegs™ is also a quadruped robot). This is also the first implementation of carbon fiber wheel-legs on a Whegs™ vehicle. The carbon-fiber reduces the mass moment of inertia eight times compared to previous aluminum designs.

Three iterations of the wheel-legs were tested to find one that was sufficiently stiff for stable control.
USAR Whegs™ uses differential steering and the user can rapidly change its running gear to and from tracks and wheel-legs. The running gear can be changed in 30 seconds and the resulting connections are secure.
The wheel-legs enable to the robot to overcome significant sized obstacles.
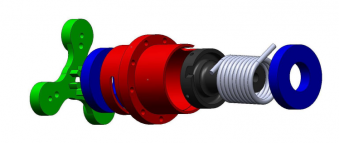
The chassis is a lightweight design to allow the robot to be man-pack able. Torsion devices are integrated directly with the wheel-legs to allow phase changes of the whegs, reducing the width of the robot, as compared to previous whegs robots, and allowing it to get into tighter spaces.

Alignment
Center
|
Alignment
Center
|
ZipperMast
GeoSystems Zippermast allows a camera to be deployed as high as eight feet above the robot. The robot is 47.6 cm long, can travel 1.9 meters per second on its tracks, and can climb 15 cm obstacles using its wheel-legs. A two-speed transmission is being developed to permit it to run more slowly on wheel-legs for better control on irregular terrain.

The development of USAR Whegs™ has contributed to the development of SeaDog