This webpage presents the design and construction of SeaDog, a proof-of-concept robot built for navigating rocky or sandy beaches and turbulent surf-zones. The robot incorporates a layered hull and chassis design, which is integrated into a waterproof Explorer Case in order to provide a large, protected payload in an easy to carry package. It employs a rugged drive train with four detachable wheel-legs and a unique tail design and actuation strategy to aid in climbing, swimming and stabilization.
Biological Inspiration
Cockroaches have remarkable locomotion abilities that provide a wealth of inspiration to address challenges of surf-zone operation. In studies of cockroach movement, we have noted the following :
- A cockroach has six legs that support and move its body
- It typically walks and runs in an alternating tripod gait
- They adapt their gait when climbing large obstacles by using both front legs together in phase
- The cockroach turns by generating asymmetrical motor activity in legs on either side of its body
- A cockroach enhances its climbing abilities by changing its body posture
- During a climb it uses flexion joints to bend the front half of its body down to avoid high centering
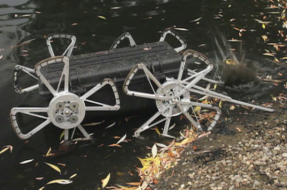
- SeaDog is an amphibious robot developed for surf-zone applications. Four wheel legs and a tail provide it with excellent mobility on sandy and rocky beaches and in turbulent surf-zone areas. A rugged, waterproof outer shell and keeps its large payload area safe during operation
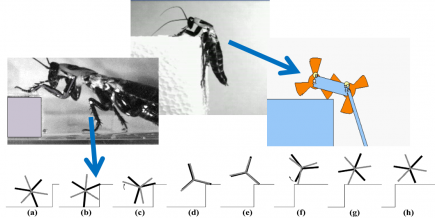
Lobsters, which thrive in surf-zones, have an effective stabilization strategy[1].
- Lobsters align their tail and claws with a surge, using them as a control surface.
- Forces on the body are directed downward providing more stability and friction.
- Sensors on lobster detect changes in the flow for continued stability.
Feet are optimized in nature for specific environments. We can draw from different sources and strategies to create feet for a robot.
- Lizards press long toes deep into the sand reaching compact sand below the surface.
- Crabs walk on the surface with eight legs, spreading the weight over multiple legs.
- The large surface of a camel’s foot compacts sand, creating a stable surface.
Design and Construction
Layered Chassis Design
- Water-resistant aluminum inner chassis provides structural integrity for the drive train.
- Waterproof Explorer Case (model 5117) acts as an outer shell with integrated seal, latches, and carrying handle.

Alignment
Center
|

Alignment
Center
|
Shaft Seal Testing
- Pressurized chamber simulates depths up to 70 meters (689 kpa).
- O-rings perform better at lower pressures.
- U-cup seals perform better at higher pressures.
- We used a combination of the two.
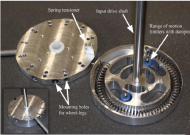
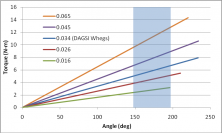
Torsionally Compliant Wheel-legs
- Torsional compliance provides shock absorption and enables opposite legs to come into phase while climbing.
- Linear springs are pre-tensioned making wheel legs rigid until a break-away torque is experienced.
- Springs can be swapped out to achieve desired break-away torques and torsional stiffness.
Drive Train and Removable Wheel Legs
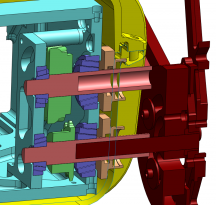
- Drive train is powerful and robust with tapered roller bearings, helical gears, and 150W Maxon Motors.
- An outer drive shaft (pink) transmits torque to and resists bending of a removable inner drive shaft (red) that connects to the wheel leg.
- With tail and wheel-legs removed, the robot takes the form of a waterproof case.
Testing and Results
General Performance Characteristics
| Chassis | Overall | |
| Length | 56cm | 114.5cm |
| Width | 30cm | 44.5cm |
| Heifght | 18.5cm | 38cm |
| Wheel Leg Radius | 19cm | 19cm |
| Tail Length (short/long) | 48cm | 58cm |
| Mass w/o Batteries | 23.8kg | 23.8kg |
| Total Mass | 25.1kg | 25.1kg |
| Drive Motor Rated Stall Torque | 2.28 N m | 2.28 N m |
| Gear Reduction | 38.1 | 38.1 |
| Max Speed | 2.23 m/s | 2.23 m/s |
| Turning Radius | 0m | 0m |
| Max Obstacle Heigth Tested | 48cm | 48cm |
| Max Seal Pressure Tested (in vitro) | 689 kPA (~70 m under water) | 689 kPA (~70 m under water) |
Climbing Simulation vs. Experiments
- Replacing the rear body segment (left) with a tail (right) increased max obstacle height from 40 cm to 48 cm.
- Improved performance is attributed to a more forward center of mass and reduced interference from rear wheel-leg.
- 48 cm climbing height failed with a tail length of 48 cm, but succeeded when the length was increased to 58 cm.
| Configuration | Simulated (cm) | Experimental (cm) |
| Tail | 48 | 48 |
| Body Joint | 40 | 40 |
| No Tail | 17 | 21.5 |
| Body Joint | ||
| Locked | 30 | 27 |
Climbing Strategy
SeaDog climbing a 48cm high obstacle. In frame three the tail helps to prevent high centering by applying a counterclockwise moment to the robot. In frame four the tail continues to help rotate the robot counterclockwise and acts as a support while the robot is off the ground.

Aquatic Locomotion
- Preliminary aquatic testing was done at the surface with a positive buoyancy using the wheel legs as paddles.
- Future testing will be done with a negative buoyancy to test the effective ness of the wheel-legs and tail as means of locomotion while underwater.
- Future work includes the addition of a variable buoyancy mechanism to enable both forms of locomotion.
