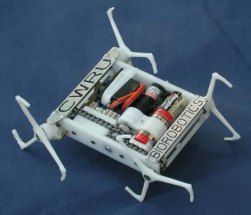
Mini-Whegs™ is a series of small mobile robots. These 8-9 cm long robots can run at sustained speeds of over 10 body lengths per second, and navigate challenging terrain.
Three spoked appendages, called “wheel-legs”, combine the speed and simplicity of wheels with the high mobility of legs. The robot can surmount obstacles significantly greater than the radius of the wheel-legs – a difficult feat for wheeled vehicles.

Alignment
Center
|
Alignment
Center
|
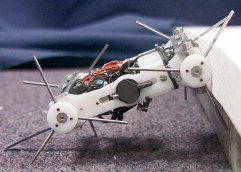
When an obstacle is encountered, passive mechanical compliance allows the front legs to come back into phase with each other, so that they can both be used to pull the robot up and over the obstacle (see picture above).
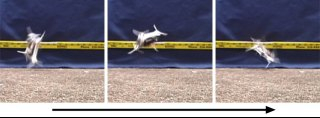
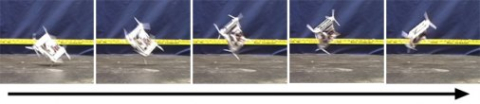
Jumping Mini-Whegs
To surmount obstacles of much greater relative magnitude, a version of the robot, dubbed Jumping Mini-Whegs™, has been developed. It can surmount obstacles of 2-3 body lengths high, such as a stair. Based on abstracted biological principles, this small robot combines simplicity, robustness and reliability to provide a desirable combination of speed, mobility and versatility.

Alignment
Center
|

Alignment
Center
|

Alignment
Center
|