Alignment
Center
|

Alignment
Center
|
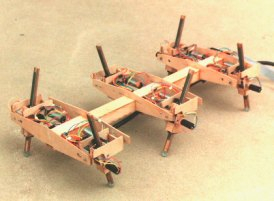
Robot I was the group’s first project. The robot has six two degree of freedom legs powered by 2 Watt DC motors that permitted straight line locomotion on flat terrain. It was initially constructed to test a biologically-inspired neural network controller developed by R. D. Beer and H. J. Chiel for a computer simulated insect. With the stimulation of a single command neuron, the network generated a range of insect-like gaits. The controller also proved to be robust to perturbations (e.g. lesions of its connections).
A second locomotion controller was also implemented in Robot I that was the foundation for the gait controller for our second robot, Robot II. This controller is based on the mechanisms and network of influences thought to coordinate the legs of the stick insect (as reported in the biological literature). The distributed network of influences between adjacent legs creates a continuous range of insect-like gaits. A single input to the controller varies the speed of the robot from zero to its maximum as its gait changes from the slow metachronal gait (maximum of one leg in the return stroke at any time) to the tripod gait (three legs in the return stroke). Perturbation studies also proved the controller to be robust to lesions of single interleg influences as well as controller wide influence mechanisms.