Alignment
Center
|

Alignment
Center
|
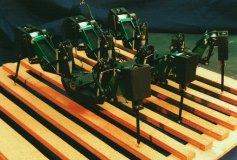
Robot II is a hexapod with three active, revolute degrees of freedom (DOF) and one spring-loaded, translational DOF per leg. Each active DOF is powered by a separate 6 Watt DC motor with an integral transmission. The sensing of joint position is accomplished by a rotary potentiometer attached to each joint. Foot forces are monitored by load cells mounted on the tibia segments. The structure of the body is composed of lightweight aircraft plywood, balsa and aluminum.
Robot II’s controller lies in an off-board PC. The gait controller is based on the mechanisms thought to coordinate the legs of the stick insect (as reported in the biological literature). It consists of a distributed system of influences between adjacent legs that induce a continuous range of insect-like gaits. By varying a single velocity control parameter, the gaits range from a slow wave gait to a fast tripod gate. Rough terrain navigation is accomplished by integrating insect-like reflexes with the gait controller. An elevator reflex is implemented to clear large objects, and a searching reflex allows the robot to find a foot support on uneven or missing terrain.