A geotechnical centrifuge is installed in the Department of Civil Engineering. It is used in many research projects in the areas of earthquake mitigation, wind energy, bridge foundation, landslides, transportation engineering, environmental hazards mitigation and advanced infrastructure geotechnology, that will utilize this piece of equipment. The centrifuge has been used to evaluate the liquefaction potential of soils by the energy-based method.
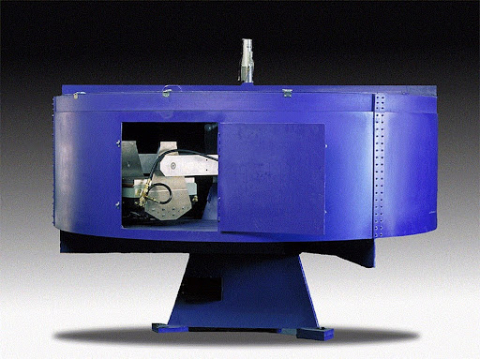
Centrifuge Design and Control System
The centrifuge is located in a below-ground open and square chamber with a height of 1.8 m and sides of 4.2 m, surrounded by 15 cm thick reinforced concrete walls and support slab. The control room floor level is raised about 1 m above that of the laboratory to provide for additional safety.
The centrifuge payload capacity is 20 g-ton with a maximum acceleration of 200g for static tests and 100g for dynamic tests. By using the dual platforms, two models can be set up at the same time with a maximum payload of 182 kg. The centrifuge main drive system consists of a 15 HP premium efficiency AC motor and torque control inverter which powers the centrifuge arm through a belt drive. The torque control inverter is programmed through a serial communication link between the data acquisition and control computer, and the inverter.
The centrifuge arm is balanced by adjusting the counterbalance weights on the swing platform which opposes the testing platform. The dynamic imbalance force is monitored at one of the three support footings with a sensitive LVDT which is attached to the centrifuge control computer. The test platform pivots from the ends of the centrifuge arm at a distance of 30 cm from the testing surface. The centrifuge arm has a radius of 1.07 m while the dual platforms lie at a radius of 1.37 m during flight and can carry payloads of up to 182kg.
Data Acquisition System
The centrifuge data acquisition system is designed to accommodate a wide variety of static and dynamic tests. Transducer excitation and signal conditioning are performed by a signal conditioning chassis which rides on the centrifuge arm in the instrumentation rack mounted over the center of rotation. The digital and analog lines for the signal conditioning chassis are connected to a multifunction data acquisition and control board. This board, in the main control computer, provides timing and configuration signals to the signal conditioning chassis and two low pass filters and multiplex modules. Transducer signals are initially conditioned by appropriate signal conditioning components. The filtered and conditioned analog signal is then passed through the slip rings and on to the data acquisition board in the main control computer.
A total of 40 electrical slip rings are available for command signals and data transfer. Sixteen channels are used for data acquisition (expandable to 96) while sixteen more channels are available to feed transducers and gauges in the model. Additional slip rings are used to supply power, video signals and shake table control.
CWRU Laminar Box Container
The laminar box is designed to permit the soil to deform with minimal interference in one dimensional shear tests. It consists of 13 rectangular aluminum rings separated from one another by linear motion anti-friction bearings to minimize the friction between adjacent rings. The bearings are placed in grooves machined on the top of each ring and the base plate. The internal dimensions of the box are 53.3 cm (length) x 24.1 cm (width) x 17.7 cm (height). The intermediate twelve rectangular rings are allowed to move a maximum of 1.88 cm in the longitudinal direction of the box from the initial centered position, while the top ring is prevented from moving by using 4 end stoppers. The rings are supported laterally by 6 supports located along the two long sides. Bearings are placed between the rings and the side supports to permit rings to move with minimal friction.
The Electro-Hydraulic Shaker
An electro-hydraulic servo-controlled shaker is used to provide the horizontal base motion, with a stroke of +/- 1.2 cm, which is applied perpendicular to the plane of rotation of the centrifuge. The shaker utilizes a linear hydraulic actuator to vibrate the model container placed upon a slip table. The electro-hydraulic shaker is a high-performance servomechanism, optimized for high-frequency operation. The shake table consists of an assembly of standard industrial components, a custom slip table supported on low friction hydrostatic bearings and a control system.
The table is operated by a two stage servo valve system is driven by a servo controller and power amplifier which rides on the center of the centrifuge arm. The servo controller responds to an be externally supplied analog signal generated by a 12 bit, high speed digital to analog converter. A hydraulic power supply provides oil at a pressure of 20.68 MPa, at a maximum nominal flow rate of 10 GPM . A standard 3 passage rotating union with a 250 RPM maximum speed is used to pass the pressure and return oil onto and off the centrifuge arm.
Horizontal and Vertical Loading System
Electro-hydraulic servo-controlled loading system is used to provide vertical and horizontal load. It utilizes a linear hydraulic actuator to apply static or dynamic vertical loads in either the vertical or horizontal directions. The loading mechanism have been used to apply vertical traffic loads to pile foundation or horizontal wind load to wind energy foundations.