In the SaPHaRI Lab, we have several projects underway—and many opportunities to start new projects as well.
First impressions significantly influence human relationships - can the same be said for robots? As robots become more integrated into our daily lives, this project explores how a robot’s initial greeting shapes human willingness to engage with it.
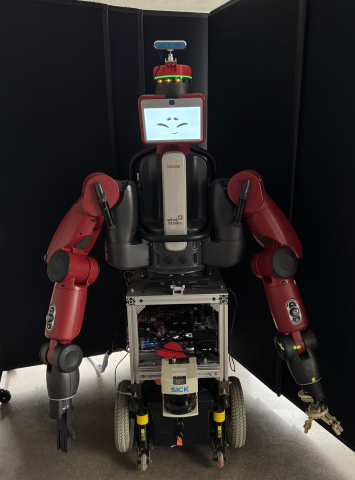
RoboSOAR develops natural-looking gestures and behaviors. This multi-stage machine learning model effectively learns and refines human-like gestures from large datasets, making them compatible with robots. Our testbed is a Baxter Robot (Rethink Robotics, 2011) mounted on a custom mobile base to study the impact of gestures, verbal greetings, and proxemic distance on human-robot interaction. This work integrates with the Compliant Gripper Project, improving tactile interactions for a more natural and comfortable social touch.
AstroPsych is a multimodal framework designed to provide dynamic mental health support in challenging environments where traditional support is limited or impossible. Leveraging asynchronous therapist guidance and real-time physiological signals to administer on-demand support sessions, AstroPsych adapts continuously to the evolving needs of individuals in crisis. AstroPsych offers a range of interaction methods, including text, voice, avatar, and robotic interfaces, to effectively meet diverse user preferences. As NASA prepares for human missions to Mars and beyond, astronauts will encounter psychological challenges beyond those experienced during previous missions, such as Apollo. The time delay in communication - ranging from 3 to 22 minutes one way - presents a significant barrier to real-time mental health support. While near Mars, this delay could be as long as 15 to 20 minutes, with complete communication blackouts due to planetary alignment. AstroPsych addresses these unique challenges, providing immediate, empathetic support when needed, thereby helping astronauts maintain their mental well-being despite temporal isolation. Beyond deep-space exploration, AstroPsych offers substantial benefits for mental health care on Earth. With a growing shortage of mental health professionals, this framework can supplement existing services by providing on-demand adaptive support during times of acute need. Additionally, AstroPsych helps to facilitate better patient-therapist matching, ensuring that individuals are connected with professionals best suited to support their needs.
This project focuses on developing affective computing technologies that address challenges in emotional regulation and promote social interaction for individuals with Autism Spectrum Disorder (ASD) and Post-Traumatic Stress Disorder (PTSD). People with these conditions often experience difficulty interpreting and expressing emotions (alexithymia), limiting their ability to engage in social interactions. The system aims to continuously monitor and quantify the user’s emotional state using a wearable device with non-invasive physiological sensors. Through a multi-modal actuation framework, the wearable will intuitively signal the wearer’s emotional state and/or social interaction desires, encouraging nearby humans to engage the wearer. This project explores real-time emotion sensing, modular actuation methods, and the broader impact of technology-mediated social touch in improving emotional well-being.


This project explores the interaction between humans and a group of mobile robots in a guided navigation context. Using TurtleBots upgraded with Raspberry Pis and running on ROS Noetic, we investigate how various aspects of multi-robot systems influence human reception and behavior. Specifically, we consider factors such as the number of robots involved, their spacing, proxemic distance, and the influence of auditory cues on the human experience. Our goal is to understand better how different configurations of robot behavior and environmental factors can optimize group interactions, enhance human comfort, and improve the effectiveness of robot-guided navigation in shared spaces.
Turtlebot Charging Station
This project focuses on developing an autonomous, wireless charging solution for TurtleBots, ensuring continuous operation without human intervention. We are designing a custom wireless charging station for the TurtleBots. Then, using ROS Noetic and Raspberry Pi integration, we are implementing a system that enables the TurtleBot to detect when its battery is low and autonomously navigate to the charging station. This involves sensor-based localization, path planning, and efficient docking mechanisms to optimize reliability. The results of this project aim to replace wired solutions with cost-effective wireless and scalable charging stations for TurtleBots.
Compliant Gripper

This project develops a compliant robotic gripper optimized for social-physical human-robot interaction, incorporating fabric-mediated tactile sensing to enhance comfort and natural touch. While existing robotic grippers focus on dexterous manipulation, our design prioritizes social touch, particularly through fabric, to create a more human-like experience. Insights from our tactile sensing research will inform the gripper’s design, ensuring it can provide affective, controlled touch in applications such as therapy, caregiving, and companionship.