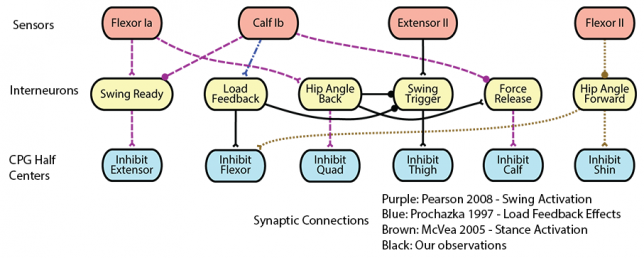
We have developed a controller for coordination of joints and legs based on direct implementation of neurobiological and kinematic research. This controller has been implemented in a simulation of a rat in Animatlab. The rat has 14 degrees of freedom which are each controlled by an antagonistic pair of muscles. These networks look very similar to that of the cockroach, and an outline of the hind leg sensory feedback mechanisms are shown below.
The inter-leg network is build primarily on three connections determined by Akay et al. (2006).
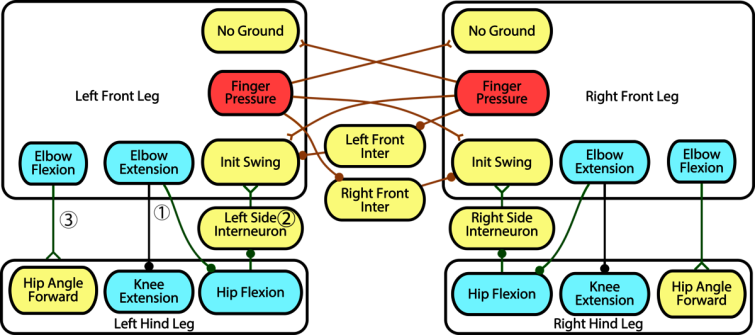
- C1: During front leg stance, elbow extension slows swing of the contralateral hind leg
- C2: After hind leg swing ends, the front leg is encouraged to enter swing
- C3: When front leg enters swing, the hind leg is encouraged to enter stance
These networks successfully coordinate walking in a simulated rat and are able to cause the return to walking motions following perturbations as is seen in the video below.
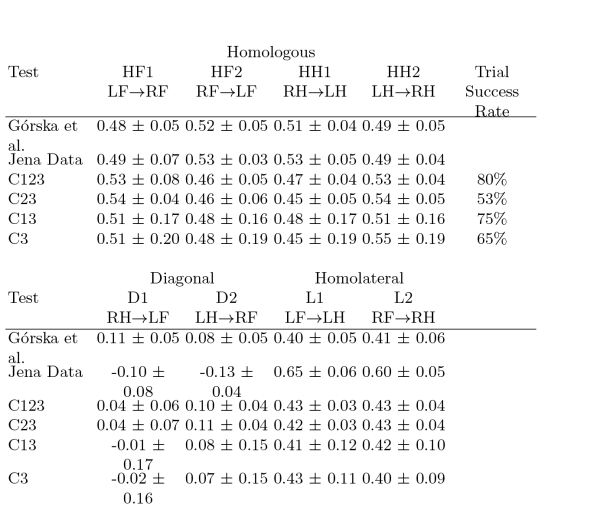
Ablation experiments on the inter-leg network shows the importance each of the three ipsilateral (same side) pathways plays in coordinating the simulation. Removal of pathway 1 decreases the ability to form coordination. Removal of C2 increases phase variability. C3 is necessary and sufficient to produce coordination.