The Tensegripede robot family is a new series of modular, biologically inspired robots. The basic robot is comprised of rigid body units joined via tensegrity joint structures. Each joint consists of a central tube rigidly connected to the leading body segment and connected to the following segment via springs. This assembly is then held in compression by a series of cables fixed to the chassis of the forward segment and connected to motors on the following segment. These joints provide compliance to the structure and can be actuated via the drive cables to control orientation.The tensegrity con nections allow the robot to actively steer and rear body segment to navigate over and around obstacles. The main goal for this family of robots is to develop robots which are low cost and easy to transport and assemble while still being compliant and mobile.
nections allow the robot to actively steer and rear body segment to navigate over and around obstacles. The main goal for this family of robots is to develop robots which are low cost and easy to transport and assemble while still being compliant and mobile.
Tensegripede I
Tensegripede I was fabricated using traditional manufacturing techniques. Each body segment is constructed from flat CNC-ed plates. This first robot is a prototype which requires a tether for power and control. Communication with the robot is achieved through an Arduino micro-controller and PWM control is generated using Stable Heteroclinic Channels as oscillators.
Tensegripede II
Tensegripede II combines the flexibility and compliance of the original tensegripede design with the manufacturing capabilities of 3D printing through a partnership with RP+M to produce standalone robotic platforms.There have been two version of Tensegripede II.

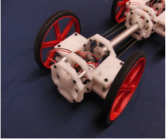
Tensegripede 2.0 features modular body units which can be printed flat and assembled via dovetails. The bodies are connected with printed rubber-like hinges. Additionally, the tensegrity joints now make use of conical springs and contain tensioning mechanisms for the cables. All of the parts are printed using Objet digital materials. The robot also uses printed compliant Wheel-legs and is controlled by laptop via Bluetooth through an Arduino Micro.

Tensegripede 2.1 improves on the Tensegripede 2.0 3D printed design to make use of additional technologies. The rigid sections of the tensegrity joints are printed using FDM and the rubber like material is now just used as protective covering on the corners of the body segments. Additionally, the tensioning pins have also been printed for ease of assembly and manufacturing. The robot is controlled via Bluetooth through an Arduino Micro through the use of any Bluetooth enables android device.