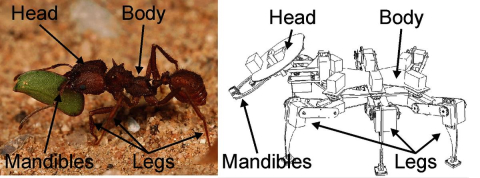
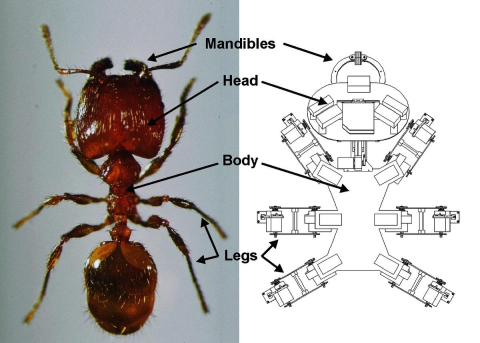
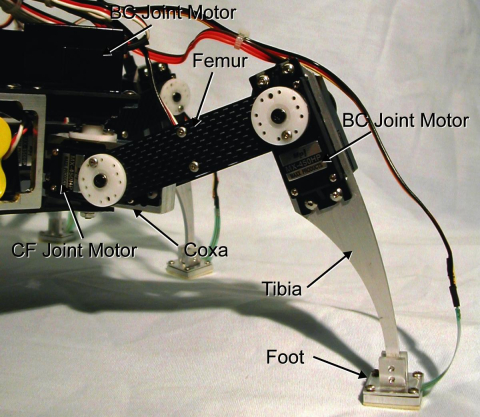
The Biologically-Inspired Legged Locomotion Ant (BILL-Ant) is an 18-DOF hexapod with six passive DOF feet for force sensing, a 3-DOF neck and actuated mandibles with force sensing pincer plates (28-DOF total). The robot uses force sensors in the feet and pincers to actively comply with its environment and respond to external perturbations.
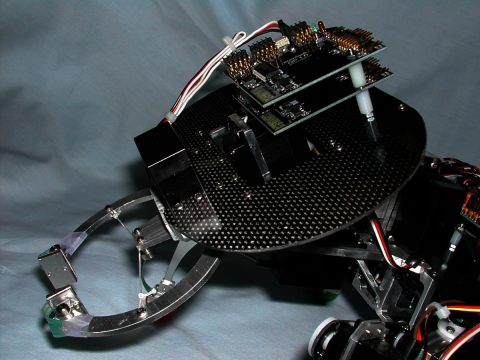
The prototype (BILL-Ant-p), shown below, was designed and constructed by William Lewinger for his M.S. degree in the Electrical Engineering and Computer Science department.
BILL-Ant-p is power autonomous and will soon be control autonomous. Using hobby servo motors for joints, it weighs approximately 6.27lbs (2.85kg) and can lift itself and an additional 7.0lbs (3.18kg) of payload while walking. While standing still it can support a 19.0lb (8.64kg) payload. Battery capacity allows for approximately 36min of normal operation or 25min of heavy lifting.
Future work will allow multiple BILL-Ant robots to independently navigate terrain and locate objects, then collaboratively carry individual objects as a team.