Goals
- Construct a kinematically correct front leg model of a Blaberus cockroach (Scale 25:1)
- Research the feasibility of an antagonistic actuation system, using tension – only braided pneumatic actuators to simulate muscle
- Investigate sensitivity to changes in the muscle origins
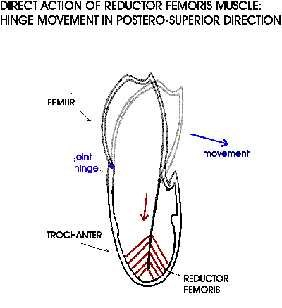
- Explore the importance of the trochanter – femur joint
- Install biologically inspired sensors
Process
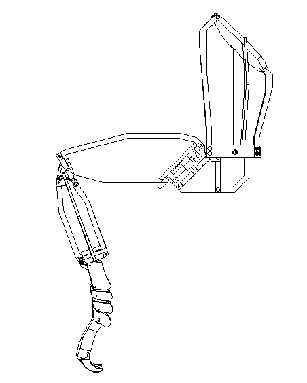
Confocal microscopy images of the prothoracic leg are obtained at the Zill Laboratory at the Marshall University School of Medicine. Sketches are made from the images and details such as condyle positions and tendon lines of action are added. The exo-structure is designed using CAD to simulate the exoskeleton. Dimensional proportionality is maintained as much as feasible (25:1). The entire structure is machined from aluminum blanks.


Details
The body – coxa joint is a three degree-of-freedom joint and one of the goals is to determine the axes of rotations. The coxa attaches to the trochanter through two condyles located on the anterior and posterior surfaces. The femoral – trochanteral joint is a one degree of joint with the condyles located on the proximal and distal ends of the trochanter. The tarsus consists of five tarsal segments and a pretarsus. All 6 joints have spring loaded ball joints. All six joints are flexed by a single actuator in the tibia that inserts on pretarsus. A fibre cable is used as the tendon and springs extend the joints.
Alignment
Center
|
Alignment
Center
|

Alignment
Center
|

Alignment
None
|
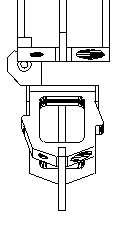
A back-stop allows for axial movement between 4th and 5th tarsal segments. The joint is slotted and spring loaded to add compliance. The tarsus is attached to the tibia by a spring-loaded ball joint. The potentiometer is encased in the femoral-trochanteral joint. Note that the large spikes are not yet included in the model. Condyle positions and orientations are precise. Femur cross-sectional height is enlarged to provide the same internal volume. Femoral-Trochanteral actuators are installed in the femur. The coxa-trochanter joint potentiometer is built into the coxa. Three DOF body-coxa joint remains to be designed. Large actuator groups will be installed inside the coxa exo-structure to actuate the joint.
Actuators
Braided pneumatic actuators (McKibben artificial muscles) are used to power the model because of their muscle like properties.
When the bladder is inflated, the mesh increases in volume. This can only be done by increasing the diameter and thus shortening its length. These actuators have a high power to weight ratio as compared to air cylinders. They are single-acting, can store energy and have a non-linear force-length relationship.
Below is a video of the leg being actuated with these signals, with the raw EMG signal overlaid.