Successful long-term settlements on the Moon will need a supply of resources such as oxygen and water, yet the process of regularly transporting these resources from Earth would be prohibitively costly and dangerous. One alternative would be an approach using heterogeneous, autonomous robotic teams, which could collect and extract these resources from the surrounding environment (In-Situ Resource Utilization). The Whegs™ robotic platform, with its demonstrated capability to negotiate obstacles and traverse irregular terrain, is a good candidate for a lunar rover concept. Lunar Whegs™ is constructed as a proof-of-concept rover that would be able to navigate the surface of the moon, collect a quantity of regolith, and transport it back to a central processing station. The robot incorporates an actuated scoop, specialized feet for locomotion on loose substrates, Light Detection and Ranging (LIDAR) obstacle sensing and avoidance, and sealing and durability features for operation in an abrasive environment.
Lunar Whegs™ was the first Whegs™ robot with an all-steel power transmission from the drive motor to each wheel-leg and has fully sealed components to keep out regolith and other material.
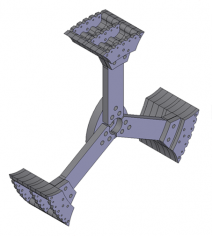
The leg design has increased surface area over previous designs and is capable of compressing loose material underneath the foot.
Alignment
Center
|
Alignment
Center
|
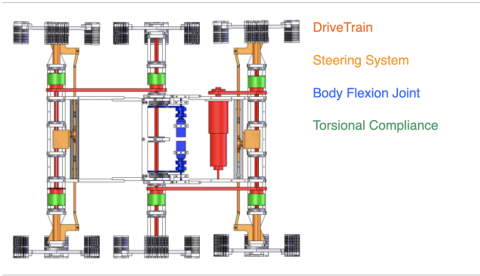
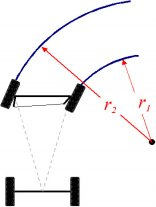
The steering system utilizes Ackermann steering to reduce forces on the wheel-legs and improve control. When the robot turns, the inside wheel-legs trace a smaller circle than the outside ones.
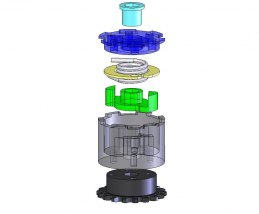
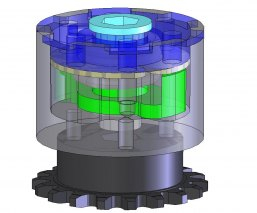
The torsion devices are fully sealed from the environment and include plastic bushing to reduce wear on moving parts. The preloaded spring resists movement under smaller torques but is capable of winding under heavier forces (such as ones experienced during climbing).
Alignment
Center
|
Alignment
Center
|
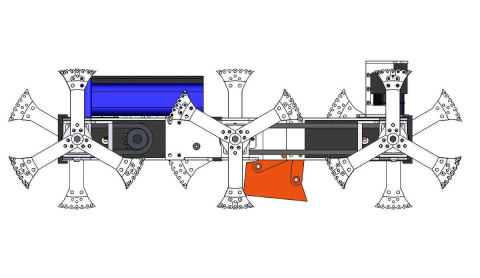
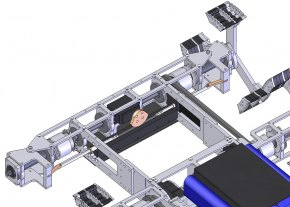
The scoop fits in the front half of the robot and is capable of collecting and transporting regolith. It is driven with a four-bar mechanism that achieves positions of scooping, carrying, and out of the way storage. The final design is primarily made of lightweight carbon fiber with a steel blade.